So Small, So Beautiful .. VSKYLABS Robinson R44
Table of Contents
This review has become a bit longer then expected. Since the start I collected a lot of additional information that resulted in a lot of enthusiasm for helicopters in general. This is partly because of my email communications with JetManHuss from VSKYLABS as well as with Sérgio Costa from Helisimmer.com. Due to the length of this review and the chapters/sections of the VSKYLABS R44 review, I’ve decided to include a Table of Contents. I hope you’ll enjoy this review that covers my own explorations with helicopters – for the 2nd time – and in particular the VSKYLABS Robinson R44.
Table Of Contents
Introduction
The Robinson Helicopter Company
A Manual and even more Manuals
What or Which Hardware Is Needed?
Four Basic Helicopter Controls
– cyclic
– collective
- throttle
– (anti-torque) pedals
Setting Up Things
The modeled R44
– External Model
– The Cockpit
The Start Up Checklist
– Start Up
– Assigning the Hardware
Test Flying VSKYLABS R44
Interviews with …..
Sounds and FPS
Summary
Introduction
It’s been a while ago that your personal reporter Angelique van Campen has reviewed a helicopter. Depending on the degree of realism, it is either not that difficult to fly them or it is quite complex to review and thus to fly a helicopter. This VSKYLABS helicopter will be a challenge. It won’t be a challenge to find out how it’s made, how the 3D model is created or how the small, but beautiful cockpit looks like. The challenge lies in hovering with regular flight sim equipment. More about that later.

The challenge will be setting up all the hardware for the R44 and then to fly it. When you’re new to helicopters and flying or controlling them, a very good website with lots of tutorials is Helisimmer.com page “How to Fly Helicopters”. But first, the VSKYLABS Robinson R44 or perhaps it’s better to check out who and what is Robinson Helicopter company.
The Robinson Helicopter Company
Robinson Helicopter Company was founded in 1973 by Frank Robinson, whose vision was to produce the world’s highest quality, most reliable helicopters in the most efficient, cost-effective way possible. Robinson introduced its first helicopter, the 2-place piston powered R22 in 1979. The R22’s simple design, easy maintenance and low acquisition cost made it popular among private owners and flight schools. As costs became less of a barrier, more people learned to fly and the demand for small, affordable helicopters increased.
In 1992, Robinson introduced the 4-place R44 (later designated the R44 Raven I). Ten years later the R44 Raven II was announced, the same as the original R44 but equipped with Lycoming’s IO-540 fuel-injected engine and 28-volt electrical system. Designed by Lycoming, in cooperation with Robinson, the IO-540 enhanced the R44’s ability to perform at high altitudes and in hot temperatures.
During 2003, Robinson began contemplating ideas for a turbine-powered helicopter. In 2005, an agreement was reached with Rolls Royce to develop the RR300 turbine engine, a derivative of the RR250 series. With a RR300 turbine engine in place, development of a 5-place turbine helicopter, the R66 Turbine, moved into high gear.
Today, the company’s top sellers are its R44 and R66 helicopters, respectively. Both models are offered in a variety of configurations including float, news and police versions. The most recent addition to Robinson’s line is the R44 Cadet, a two-place R44 specifically designed for the training market. (Courtesy of Robinson Helicopter company)
A Manual and even more Manuals
Ho ho, hold on, what about the installation?
Ok, sorry about that, but it won’t take long. After you’ve bought it from the dedicated X-Plane.Org store page or you can even buy it directly from VSKYLABS, you download the R44 package and install it under the X-Plane Aircraft folder or when you own more VSKYLABS products, you can also create a sub folder VSKYLABS and install the Robinson 44 in this sub folder.
There’s no need to activate the product with a serial key, but what’s handy is that you can keep the R44 updated via the STMA Updater. Also for this auto updater there’s no software needed. In this way your VSKYLABS Robinson R44 is kept up to date at every X-Plane start-up.
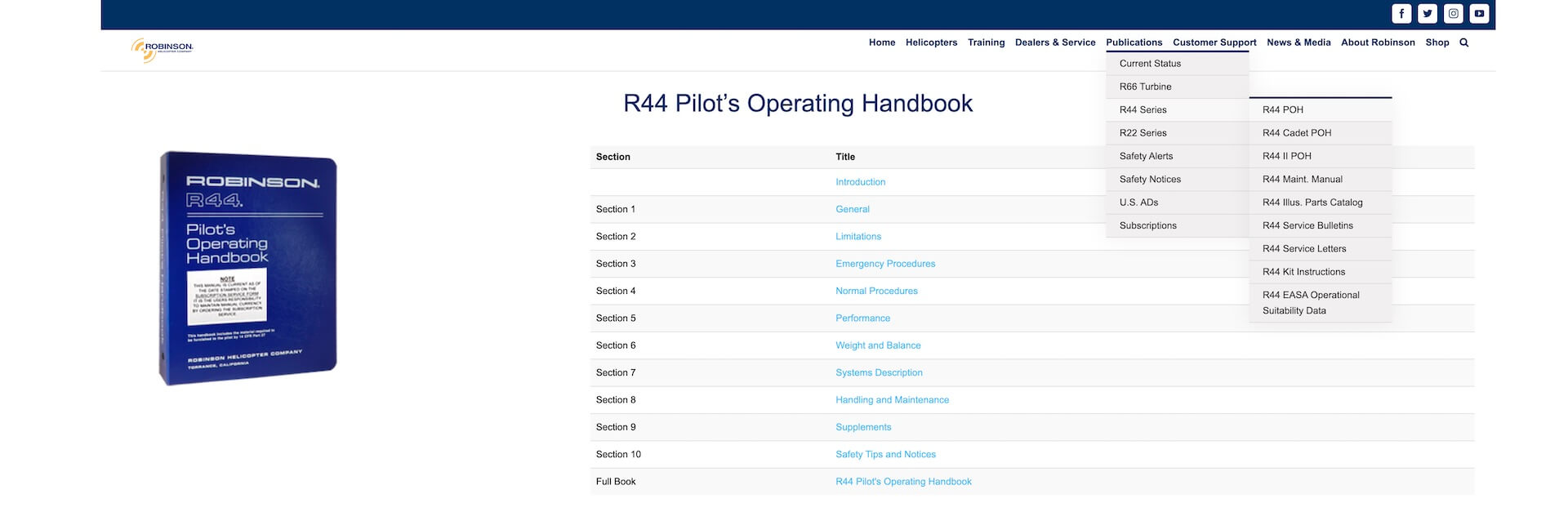
The VSKYLABS Robinson R44 comes with 2 manuals, but perhaps it’s an idea to check out also the official Robinson POH (Pilot Operating Handbook). For your convenience, you can directly download the full POH via this URL or you can check out for more information the dedicated Robinson web page. Seek for the Robinson website menu Publications – R44 Series.
Ok, back to the included VSKYLABS manuals. The R44 comes with the following Acrobat files:
– VSKYLABS Robinson R44 POH
– VSL R44 Essentials
A nice note for you is that the VSKYLABS POH references to the official POH which I mentioned before in the previous section. The VSKYLABS Robinson R44 POH manual is not thick. It’s just 26 pages, but it covers all what’s needed although it’s perhaps a bit overwhelming how to set up the model within X-Plane and how to assign the right controls to your hardware, in particular when you’re not familiar with helicopters. More about the setup of your hardware in the following section.
Further on, this manual comes for those who own VR equipment, a large section how to setup and control/operate the R44 with VR (Virtual Reality). If this VR is all written well, I don’t know. I’m sorry, I can’t judge about it since I’m on an iMac thus using macOS and for Mac there’s no longer any VR available. This VR section is followed with a familiarization of the implemented systems and how to use them. In the last part you’ll find direct links to the official Robinson Helicopter company OPOH manual sections.
What I personally miss in this R44 manual is a kind of tutorial how to fly helicopters. I mention this since I started this review with a minimum of helicopter experience and although I did a lot of flights and practiced how to hover, a tutorial with the basics would be welcome.
The VSL R44 Essentials manual is just as important at the previous discussed manual, or perhaps even more essential. It’s only 3 pages, but of essential importance. It explains the importance of three essential joystick/key assignments namely the collective-, throttle- and cyclic axis. On page 2 you can find a summary of all the joystick/key assignments that are needed, but not mandatory except for the essential ones.
Oh yeah, by the way. When you want to know even more about general helicopter flying, please stop by at the official FAA website and download the complete free – no registration needed – FAA e-book Helicopter Flying Handbook.
What or Which Hardware Is Needed?
Unless you’re a vivid helicopter simmer, you will most likely have dedicated helicopter hardware, but I think that many simmers will either have a joystick or a control wheel, a throttle device and perhaps rudder pedals. Your personal reporter Angelique is one of those simmers who owns a lot of hardware, but no dedicated heli stuff.
That said, I own several Saitek joysticks, the Honeycomb Alpha control wheel unit, the Honeycomb Bravo unit and belonging Saitek throttles, but no rudder pedals. Personally I prefer to use the Saitek X56 H.O.T.A.S. although you can also use the X52 Pro, but there’s a reason that I prefer for the helicopter to use the Saitek X56 joystick. A flight simulator control wheel, in case you have no joystick, could also be possible, but the joystick comes more in-line with what a helicopter has. Having no rudder pedals is not directly a problem although it could make life much much easier, but what said, without rudder pedals other steps have to be taken to make hovering, and flying a bit easier.
Four Basic Helicopter Controls
This section is not directly related to the modeled Robinson R44, but I found that it’s needed to add this basic information in the review. When you think about flying helicopters you think about complex machines, very difficult to fly, even more difficult to hover. Sorry to say, helicopters are easy to fly, but yet complex. So you first need to understand how or which controls does a helicopter has and what does what.
The following information gives you a bit more in-depth information about the helicopter controls. It is on courtesy taken from the FAA Helicopter Flying Handbook.
Helicopters have 4 controls, of which can be considered the main ones:
– cyclic
– collective
– throttle
– (anti-torque) pedals
They will all help you control your helicopter in all axis.
The cyclic control is usually located between the pilot’s legs and is commonly called the “cyclic stick” or simply “cyclic.” On most helicopters, the cyclic is similar to a joystick; however, Robinson helicopters have unique T-bar cyclic control systems. A few helicopters have cyclic controls that descend into the cockpit from overhead while others use side cyclic controls.
The control is called the cyclic because it can vary the pitch of the rotor blades throughout each revolution of the main rotor system to develop unequal lift (thrust). The result is to tilt the rotor disk in a particular direction, resulting in the helicopter moving in that direction. If the pilot pushes the cyclic forward, the rotor disk tilts forward, and the rotor produces a thrust in the forward direction. If the pilot pushes the cyclic to the side, the rotor disk tilts to that side and produces thrust in that direction, causing the helicopter to hover sideways.
The collective pitch control, or collective, is located on the left side of the pilot’s seat with a pilot-selected variable friction control to prevent inadvertent movement. The collective changes the pitch angle of all the main rotor blades collectively i.e., all at the same time and independently of their positions. Therefore, if a collective input is made, all the blades change equally, increasing or decreasing total lift or thrust, with the result of the helicopter increasing or decreasing in altitude or airspeed.
Helicopter rotors are designed to operate at a specific rpm. The throttle controls the power produced by the engine, which is connected to the rotor by a transmission. The purpose of the throttle is to maintain enough engine power to keep the rotor rpm within allowable limits to produce enough lift for flight. In single-engine helicopters, the throttle control is typically a twist grip mounted on the collective control, but it can also be a lever mechanism in fully governed systems.
And finally, the anti-torque pedals are located in the same position as the rudder pedals in a fixed-wing aircraft and serve a similar purpose, namely to control the direction in which the nose of the aircraft is pointed. Application of the pedal in a given direction changes the pitch of the tail rotor blades, increasing or reducing the thrust produced by the tail rotor, causing the nose to yaw in the direction of the applied pedal. The pedals mechanically change the pitch of the tail rotor, altering the amount of thrust produced.
What said in the beginning of this section, more information can be found at the FAA website or also, with videos, at the Helisimmer.Com website.
Setting Up Things
What does that mean … setting up things?
As I mentioned in one of the previous sections, you need to setup your hardware to work with the Robinson R44. Both VSKYLABS manuals explain that although when it’s the first time for you, it could be a bit difficult to understand what to assign. But there’s something else besides these VSKYLABS manuals that I would like to highlight and that’s making your joystick more helicopter friendly. Again, this is an article from Helisimmer.Com. The article deals with a older Saitek joystick, but also refers to the newer Saitek or Logitech sticks. And while spitting out that information, please stop by at this dedicated Helisimmer.Com page. It offers the 5 things you need to start flying helicopters.
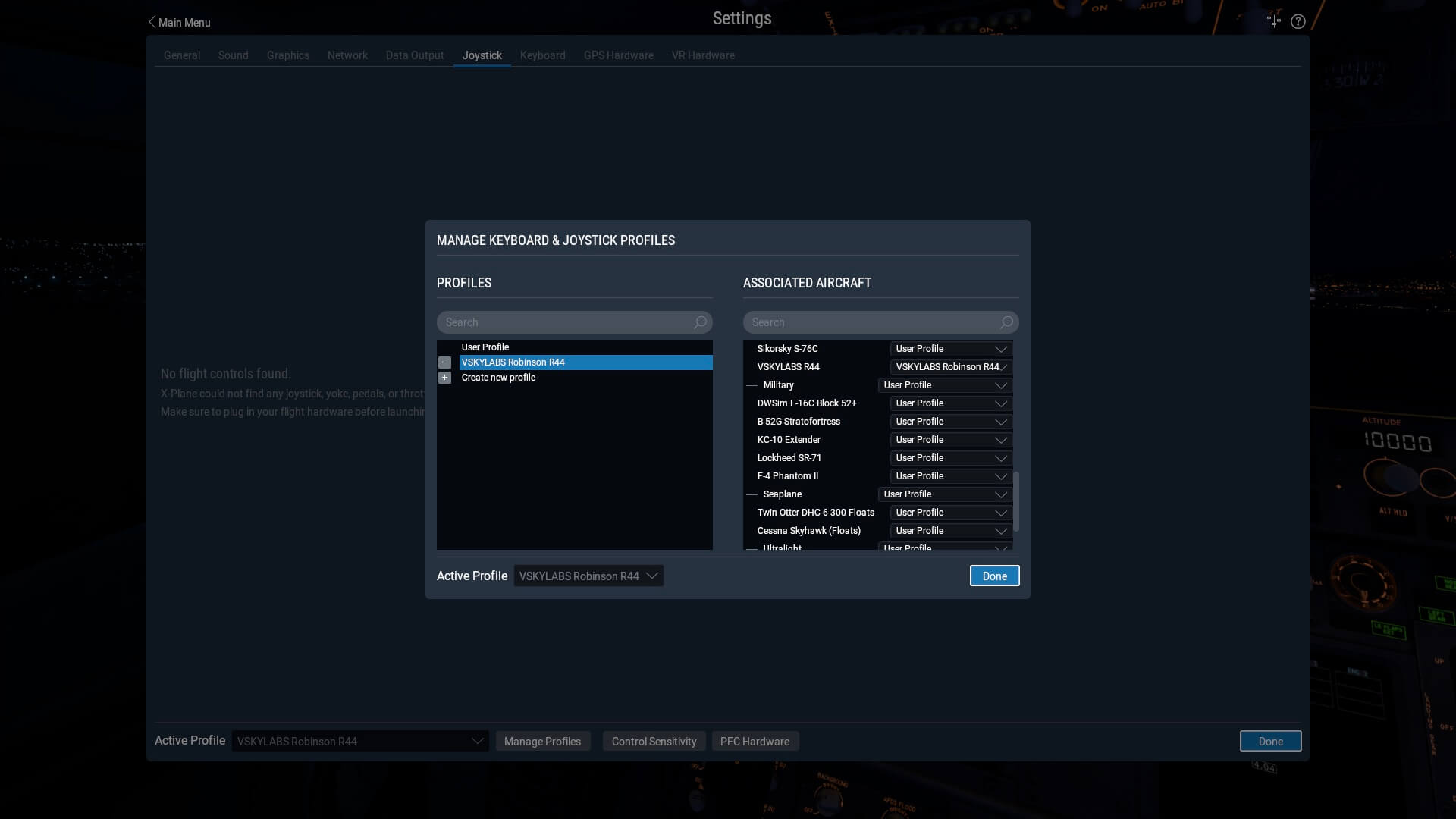
Back to the VSKYLABS Robinson R44 assignment steps. I do this in combination with my Saitek X56 joystick and throttle unit. I remove from the joystick the spring as explained in the previous paragraph. It’s also a good idea to create a dedicated profile for either helicopters in general or for this dedicated VSKYLABS Robinson R44. I went for the last option; a dedicated profile for the R44 and assigned it to the Robinson R44.
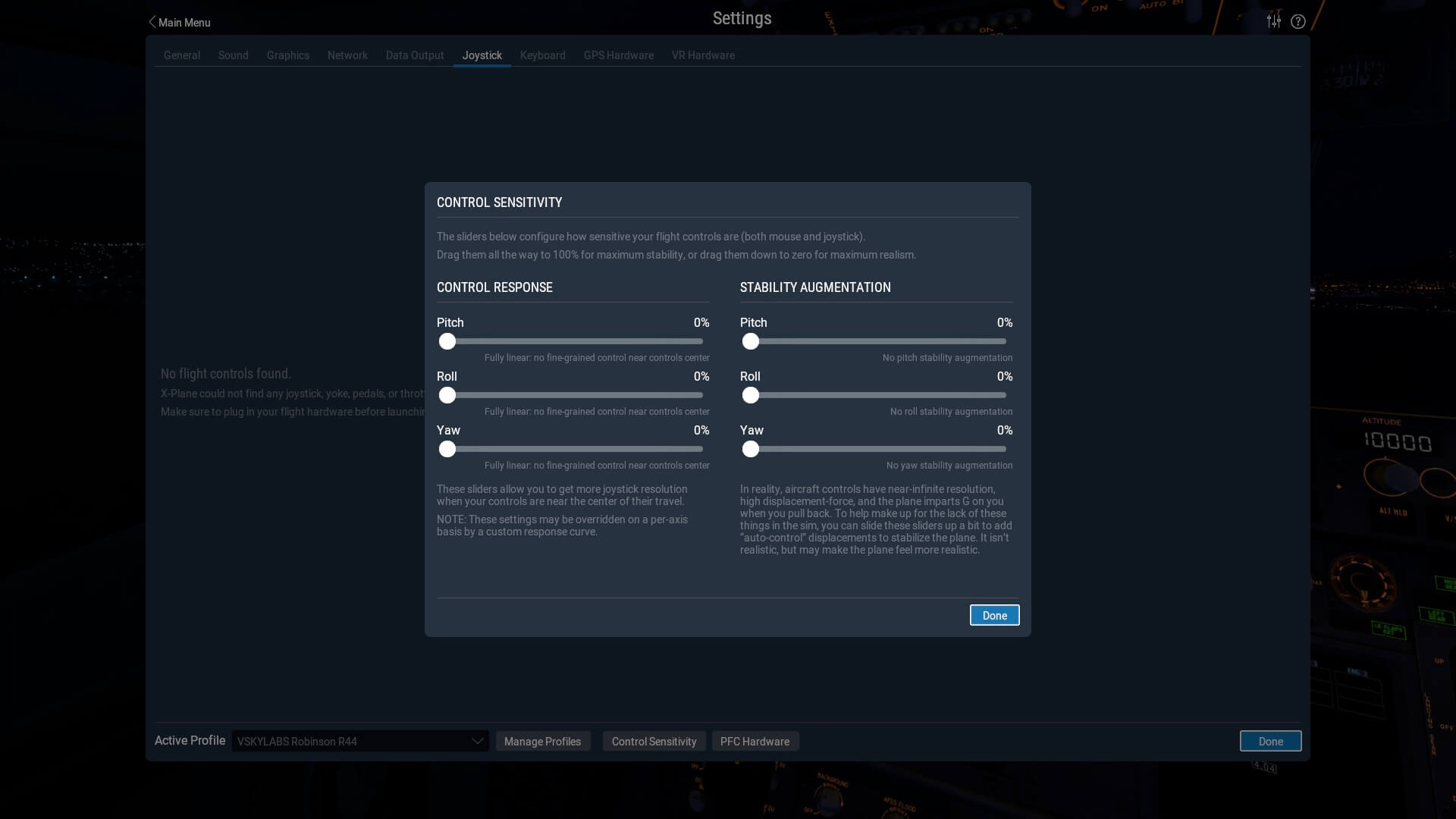
By the way, the advantage of using dedicated profiles for e.g. GA single engine aircraft, or commercial aircraft, and in this case for a helicopter, is that you won’t mess up assignments between fixed wing and helicopter hardware. Next, second screenshot, I’ve adjusted all the control sensitivity sliders to 0 as mentioned in the VSKYLABS Robinson R44 POH manual page 6.
What comes next was a bit confusing to me, but once you get the idea, it isn’t. On page 7 of the VSKYLABS Robinson R44 POH manual the first thing you need to do is you assign the throttle control to “Wing Sweep”. Normally for a fixed wing this is assigned to “throttle”. Just ignore that there’s on that screenshot in the manual showing “Axis 4” because that is most likely not what you see in your simulator. Other assignments are explained onwards till and including page 10 with a summary on page 11, BUT first you need to assign the controls to your hardware equipment, right?
To do that , you need to open the other manual – VSL R44 Essentials – and assign the collective and cyclic axis. Some notes from myself; choose a slider or throttle lever (in case you have two throttle levers) on for example your throttle unit which you want to assign to the collective. Besides that, you also need to assign the anti-torque or YAW. I tried different rotary knobs on my throttle and even on the base unit of the X56 throttle unit which feels the easiest way to control the collective while adjusting for anti-torque. When you have rudder pedals, then they will be assigned to YAW.
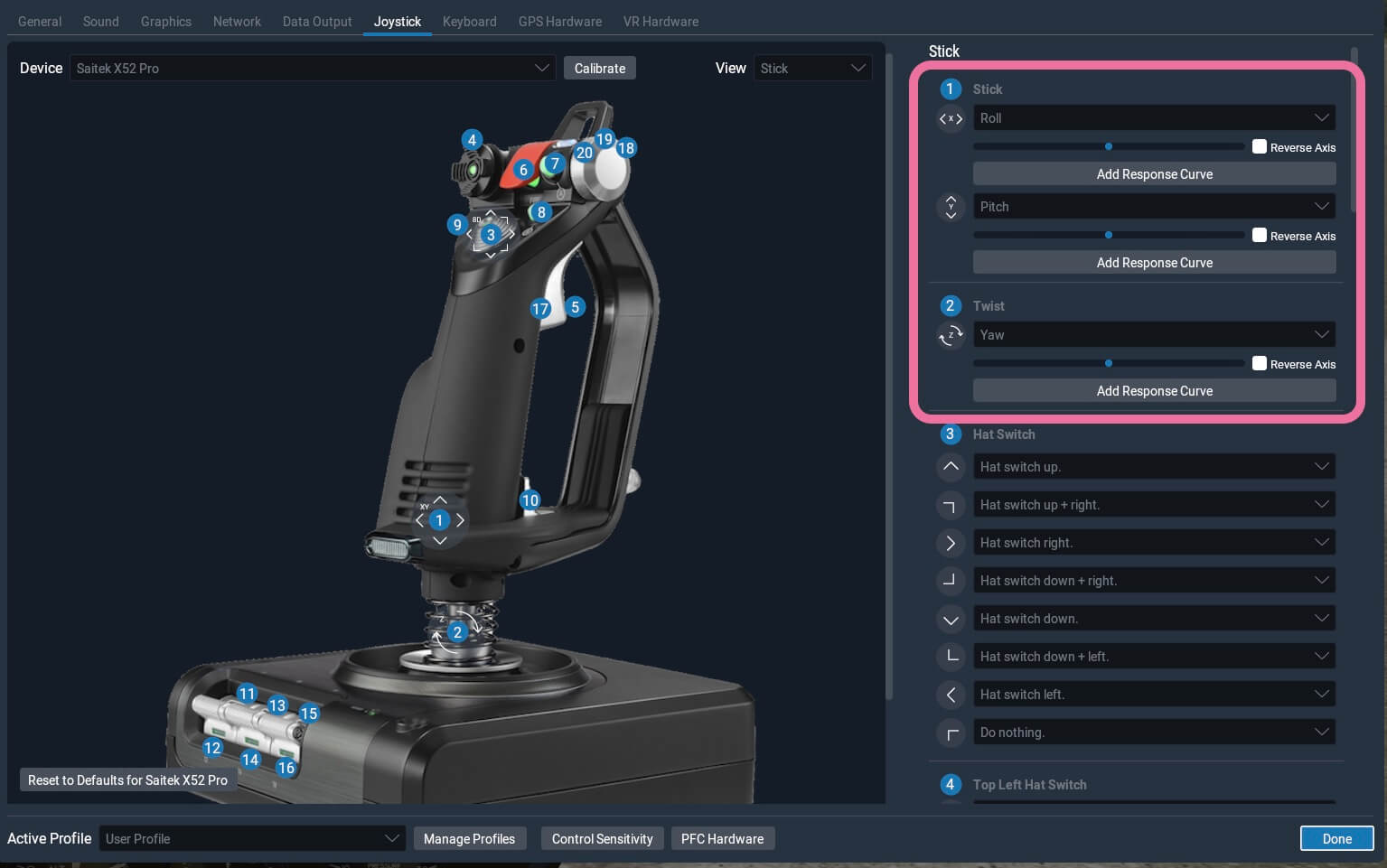
In the following screenshots which are taken with the Saitek X52 Pro, I’ve assign a slider on my throttle unit (light blue square) to “Collective”. On the same screenshot you also see that throttle handle – blue arrows – is assigned to “Wing sweep”. and finally, I assigned to the joystick ROLL and PITCH axis for my cyclic control (second Saitek X52 Pro screenshot). As a reminder; when you also use a X52 Pro then it’s handy to follow the description on Helisimmer.Com about the joystick spring with T-wraps. When you use or own perhaps the X56, then you simple detach the joystick from its base, remove the spring and reconnect the joystick, but now without a spring installed.

After I’ve assigned a couple of the other functions it’s finally time to explore the VSKYLABS Robinson R44. Ready to join me?
The modeled R44
External Model
Before I start with my external check, I would like to add this; normally it’s for every X-Plane aircraft or rotorcraft add-on important that it looks realistic, and that dimensions are reflecting the real model as well as, whenever applicable, screws and rivets are visible in a normal way. For a small rotorcraft like this R44, it’s important too, but the flight dynamics and thus how real it flies or how easy it is to control, is just as important if not even more important.
That said, I’ve assigned some of the animated doors to the R44, to get an idea how the modeled R44 looks like with doors opened. I’ve updated my R44 to the latest version which is of this writing 1.1c. For me it’s almost impossible to assign everything as stated in the manual. Oops, I’m moving away from what I should do .. the external R44 look and feel.
I’ve opened the doors, parked the R44 at KFAT helipad, and with a nice outside temperature, I start the walk-around check. It won’t take long, but I can tell you that many tiny things are modeled. The overall looks gorgeous, at least, that’s my opinion. I’m very happy with what I see. When I compare the modeled skin plates with a real R44, I must conclude that the developer has tried to give it an as real as it gets look.
The struts while in the US they call it the landing gear can be covered with the NO STEP protections, which was assigned via a X56 throttle switch. You can also show them and let them disappear by clicking one of the struts. The skin looks nice and although you could have the idea that it’s all a bit too flat. No! No no, this is how a real R44 skin looks like too. Don’t forget that the real R44 is a high performance helicopter and when something is high performance, then it has to be as smooth as possible. Walking to the rear of the fuselage, and looking to the tail, a lot of time is put into the realistic look of the tail rotor. There’s nothing to complain about.






Even the mechanism at the tail and main rotor are both modeled with the necessary details and yes, I would like to see even more details, but too many added or tiny parts means more polygons and more polygons mean a possible reduction of your frame rates. A small remark I could have is that it all looks so clean, no dirt, no nothing. This is also the case with the two included liveries. No scratch, no dent, no weathered look at all. Although I highlight this missing weathering, it’s also a matter if you like it or not, so more a personal taste.
Worth to mention are the awesome looking landing light bulbs although I’m wondering if they are the same as the real current Raven II lights, but neither less, it looks gorgeous. A typical LED lamp unit. I could mention that I don’t understand why the rivets on the screenshots above/below are black while on all the factory pictures they are the same color of the painting/livery. Is that important? Not really, but that at least you’re aware of this.





Overall I’m happy with the modeled Robinson R44. Ok, perhaps some details could be a bit more realistic like the painted rivets but on the other hand, realistic flight dynamics is more important.
The Cockpit
I always find the word cockpit a bit over the top for such a small tiny helicopter, but actually, after talked to JetManHuss, the R44 isn’t such a small and tiny helicopter. According to JetManHuss “in the world of General Aviation helicopters, the R44 is not really being considered as “small” – it is of course relative – but it is quite similar to a Cessna C-172 in the fixed wind-department. In fact, the R44 is also being used as a utility aircraft and just to give you the idea, the R22 is a two-seater, “small” helicopter.”
VSKYLABS has chosen for a model with old fashioned instruments. Current new models from the Robinson factory come with DU (Display Units) featuring Garmin DUs. Again, what’s used in the modeled R44 is not so important, as long as the R44 flies as real as it gets and when reading the manual carefully, this is what the developer had in mind.

OK, I’ve opened the left- and right-hand pilot doors and see a nicely well crafted interior. Since I don’t own the VSKYLABS Robinson R66 yet, I need to find my way with the POH in my hand where I can find all the components although many of them are familiar and can be found in GA aircraft too. Not so complicated since the majority of instruments, switches, levers, knobs and so on, are at the instrument panel, a couple of things above my head and near the floor. That the cockpit looks very clean and pilot seats that are thin, sleek and basic, sorry simmers, that’s the way the real R44 could look like too.
What I mentioned before during my external check, is also applicable for the interior; not much weathered panels, or used/dirty pedals. Besides that, the model does have everything modeled as you can find also on older R44 photos. All instruments I see are home-made which feels good. This is of course the same for the switches, the one and only red guard, light bulbs etc.
More information about home-made components can be found in the “Interviews with” section. As probably also applicable for the VSKYLABS R66, it’s a clean interior with lot of space you would say, but it’s in real and as it is modeled, a very small cockpit for two persons. Anyway, the added AviTab looks very nice and offers a lot of additional information. Don’t forget, as also stated in the manual, that you need to download the AviTab package via X-Plane.Org and add the AviTab plugin in the Robinson R44 plugin folder.





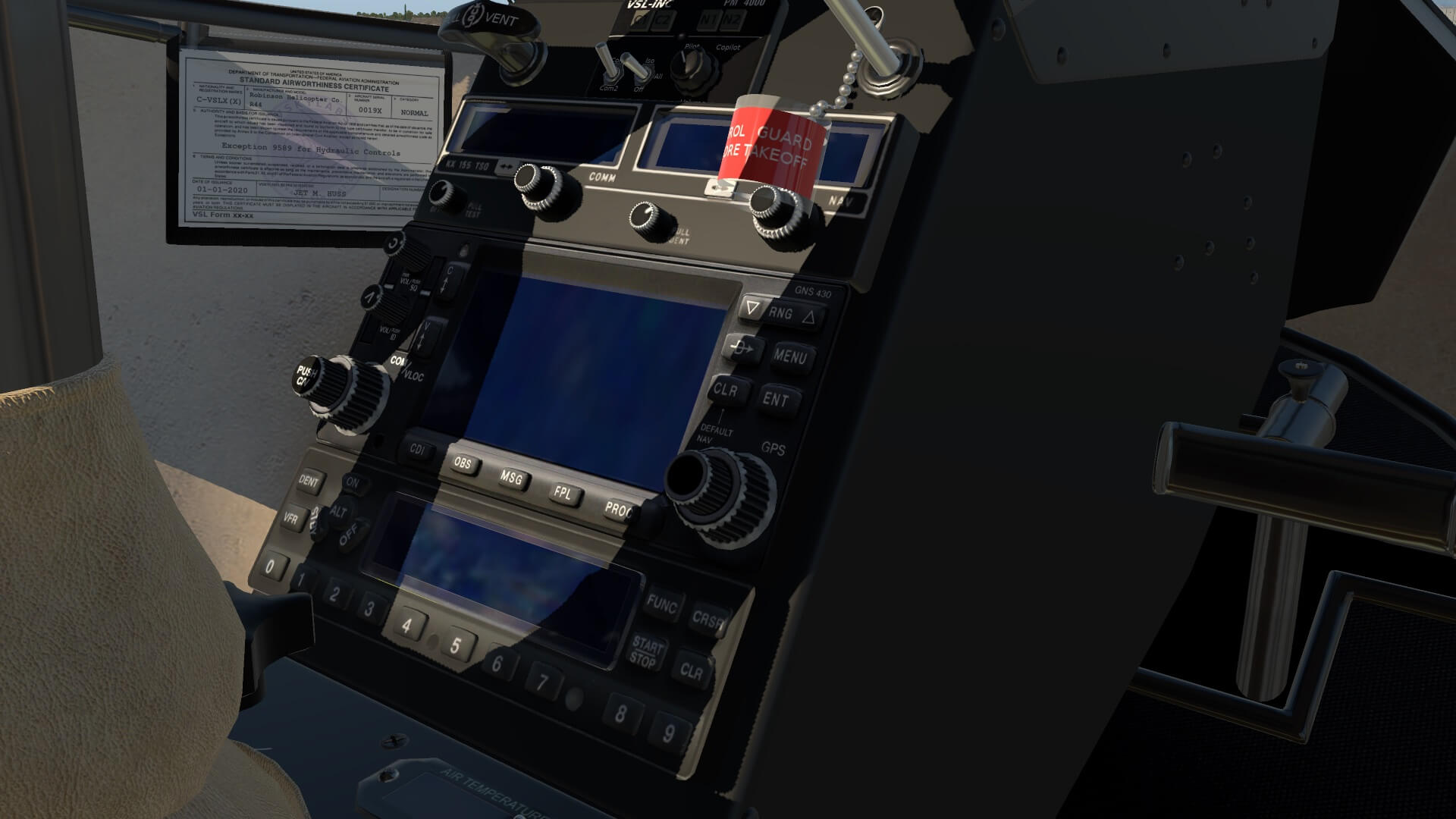
When zooming in on the pedestal, or on the main instrument panel, I’m impressed with the tiny details I see. All the text on the panels or sub panels is razor sharp, no blurry at all! I mentioned the red guard for the CLUTCH switch. I’ve never seen such a well modeled plastic guard. Well done! The annunciator lights spread out over the panels look realistic and what do you think about the cover over the MIXTURE knob. It looks nice that R44 Raven II POH stick in the right-hand sidewall although it has no function.
Looking to the ceiling I see many headsets hanging and you could wonder why this is all there? The answer is simple and funny to see and to achieve. It are the headsets for both the pilots and/or passengers. Oops, did I miss a configuration popup window or other panel to add or remove a pilot, passenger or other features?
No, you and I didn’t miss anything. The funny part is that when you use the default X-Plane Weight and Balance, you can increase/decrease the payload. When you increase the payload slider, you add in reality an additional pilot and passenger(s). When you closed the Weight and Balance, you’ll notice that the R44 is filled with additional persons and each of them having a headset on.
By the way, talking about a manual or checklist. Very nicely modeled is the checklist – visual 3D checklist visualization – that is held in position by a “virtual” arm. I mentioned this earlier, that you can follow the whole list of adding keys, knobs or switches and assign them to perform several actions. I don’t have so many switches available on my Saitek X56 set, but I think it’s also a personal matter to assign it all or jut a couple of items from the list.




And last but not least, the cyclic situated in front of the right-hand pilot seat. It has been decided that it’s only available for the right-hand pilot and not stretching out to the left-hand pilot seat. While seeing this, I check several R44 old and new movies and many R44 have it either as it is modeled by VSKYLABS or perhaps when being a R44 Trainer, also stretched out to the left-hand pilot seat. with this knowledge, I checked the included POH again, but couldn’t find any sign of how to extend the cyclic bar.
Oops, that’s a big mistake from me. I figured out that you can extend the bar for the left-hand pilot seat by clicking the yellow end of the cyclic bar manual. Awesome! I like this!



The Start Up Checklist
Start Up
I’d assigned a switch on my X56 throttle unit to get the visual 3D checklist in view since I couldn’t find a “clist” that can be used in conjunction with the XChecklist plugin. Following the visual checklist isn’t a big deal especially when you have read which I suppose you and I did, the included POH.
When you’re not familiar with VSKYLABS Robinson helicopters, it might be difficult to find the starter switch, which is at the right -hand side of the cyclic. I checked the steps needed to start up versus several real videos on YouTube and as far as I could see, everything works in accordance with the real R44 and believe me, it’s far from difficult.

But then, time to explore Mother Earth from the air in a helicopter. When you know helicopters and have dedicated hardware to fly them, you step in, follow the startup procedures and off you go. For those who haven’t got any dedicated heli equipment or not much or no flying experience at all, it will be a challenge to handle a heli, but believe me, I did follow these steps too and yes, I even had my ups and downs, literally. And all of this had nothing to do with the modeled R44. VSKYLABS is known of their realistic flight dynamics, being able to simulate within the X-Plane boundaries.
Assigning the Hardware
Yes yes, I know, I did discuss something like this before, but it’s so important for those who don’t have dedicated helicopter hardware like me.
Perhaps you own Saitek/Logitech joystick equipment. If so, then perhaps this section will help you too in assigning the helicopter functions as I did. I won’t say that this is the right and only way, but it gives you an idea how I assigned all the hardware to the R44. I contacted VSKYLABS and Helisimmer.Com to offer them their views in what is best and what is less efficient. I own the Saitek X52 Pro and the X56 H.O.T.A.S. and as previously mentioned, I used for this review my X56 because it offers a lot more switches then on the X52 Pro that can be assign to several R44 functions and the X56 comes with 2 throttle levers while the X52 Pro has only one throttle lever.
Ok, at the X56 throttle unit I’d assigned the left-hand throttle to “wing sweep”. I tried both the reverse or regular, but found out that it works for me the best not ticking reverse. The right-hand throttle will be assigned as “collective” while the rheostat or rotation knob on top of the right-hand throttle will be the YAW channel for the anti-torque function.
I do this because I don’t have Saitek or any other brand hardware pedals and because moving the collective gives me the option with the same hand to correct for anti-torque which is normally done via the pedals. The X56 joystick will have the regular ROLL and PITCH channels, but not the YAW channel as explained before. On advice of Helisimmer.com Sergio’s article, I remove the spring underneath the X56.

Although the above is not the best hardware equipment for flying helicopters, it should work and I can tell you already, it will work out well. I would like to add the following and this is one of the many suggestions from Sérgio Costa, editor and owner of Helisimmer.com. According to Sérgio “having dedicated helicopter hardware would be awesome, but a joystick is also good but rudder pedals used for the anti-torque of the tail rotor will make a huge difference then any other YAW solution.”
Test Flying VSKYLABS R44
I’m not a vivid helicopter simmer, but I like challenges and when you know me, then you know that I always look for new things.
I’ve parked my R44 at KFAT at the official helipad H40S although I could take any other spot at the GA ramp too, but suppose I can’t handle my controls well, then I easily destroy other GA aircraft that are parked nearby. I kept in mind all the tips and tricks from Sérgio and Huss or JetManHuss, and with that I follow the start up procedure, do the final things I need to do and then I slowly move the collective – remember, that’s on my Saitek/Logitech X56 the right-hand throttle – and while moving the collective slowly forward, I slightly correct with the assigned rotary knob on the same throttle for anti-torque that can be seen. “That can be seen” means that you see the helicopter tries to yaw and with very small increments I correct for that.
When I’ve reached approximately 2000+ MANIFOLD PRESSURE, corrected for yaw, the R44 slowly and gently lifts off. Honestly, this takes time and effort and won’t be always that easy as just described. In the beginning it took many many times before the R44 made a lift off and started to hover, so this is also the reality.




As instructed/advised I leave the collective as it is, but keep on monitoring what the R44 is doing. When it starts to decrease altitude and falling back to the ground, I add a bit more collective and check immediately to add some anti-torque which is needed. As mentioned before, now I see and feel that having rudder pedals is much more easier and quicker to respond although it works reasonable also with the rotary knob I’d assigned for this.
Important and listened to both Huss and Sérgio, I do all these adjustments carefully. That said, make a small change to the collective when needed, add a small yaw correction, but just small and wait what the R44 is doing. When it doesn’t YAW, leave it for the moment as it is. So I add small corrections and I don’t try to over-react. I don’t try to move the collective or the anti-torque rotary knob to quickly. I do it all gently and that works. For experienced helicopter simmers it sounds all normal, but when you’re a beginner, remember …. small adjustments and don’t try to panic, don’t try to over react! and believe, it happened to me many times, but I slowly got the picture!
Back to the test flight. The R44 is now nicely hovering although I can’t sit back and relax. I need constantly check what the R44 is doing. When the collective and thus the lift high enough, before I know, it climbs further up and now it’s time to check once more for the collective and anti-torque, but I feel this is OK and then it’s time to move carefully the cyclic – the joystick ROLL and PITCH – in a direction I want to go to.




I’ve selected at the AviTab MAPS which helps me where I fly. Since the R44 is equipped with the default X-Plane Garmin GNS 430, you’re also able to enter a flight plan. The flight plan format is the default “fms” and many online or offline programs are available to make these. I used for this Little Navmap. It’s a free add-on although Alex who’s the developer of this add-on, always appreciate your donation. Anyway, the R44 isn’t equipped with an Auto Pilot thus you need to fly it all by yourself. I can tell you once you’re in the air, and out of the In Ground Effect, it flies so nice and gentle.
But again, I can’t say it enough, I constantly need to monitor what the R44 is doing. Since the cyclic – the joystick – has no spring anymore, when I don’t touch the stick it will fall in a direction and that means a cyclic input for ROLL, PITCH or a combination. In other words, when you have at least 20+ knots, the R44 is easy to handle, but when the speeds starts dropping, I try to keep it far above the 20+ knots speed else I run again in problems.
Although it’s all normal and belongs to a heli, every speed below the 20 knots means to me as unexperienced helicopter pilot a very nervous and unstable helicopter. It’s not fair to write it this way, but that’s how I felt it, in particular the first days. When the speed is 20+ knots, then you can more or less do what you want with the helicopter and then the fun starts.
If you want to following a flight plan, that’s up to you. There’s no need to select on the GNS430 VLOC or GPS since there’s no FMS and/or Auto Pilot that can and will follow the flight plan. I’m curious how it feels to fly the modeled R44 and since I have no real helicopter or Robinson R44 experience, I can’t judge if it flies as real as it gets. Sorry about that! But what I do with this review is trying to give you an unbiased impression of this R44 and how I used the R44.
Anyway, as written before, once the R44 is passing 20-25 knots, it becomes very stable, but attention is constantly needed. Before you know, your speed can drop to 20-25 knots, and the R44 can start yawing again so constant attention is needed. In other words, it’s fun to fly, honestly, I mean that from my heart, but you need to be on top of everything. You can’t loose any attention.





I noticed that constant tracking of the V/S (Vertical Speed) is needed. That’s partly because I don’t feel anything what the R44 is doing. All because there’s no motion! As long as I keep the V/S within acceptable limits, not too high, all goes well. When I lower the V/S to approximately 0, the helicopter speed increases – logically – and when I move the cyclic a bit forward, the R44 starts descending. I write it again, as long as you keep the speed at 20+ knots or above – let me be at the safe side – it’s an easy to fly helicopter. For sure as real as it gets!
But there’s also a moment you want to descent and back to hovering at the spot you have in mind and I can tell you, descending as long as you do it all gently, relaxed and keep that speed above 20-25, oh no, to be safe at approximately 30 knots, isn’t difficult, but the hard part is back to hover and land at your designated spot. This is an stays hard and will cost you a lot of time to master.
As mentioned in the beginning of this review, all Control Sensitivity sliders – Control Response and Stability Augmentation – should be set to 0 which gives the R44 the most realistic behavior but also more difficult to fly. With that in mind I decided to check this with JetManHuss and he came up with the following suggestion; “Obviously, the beginner pilot would want to set all 6 sliders to 100 percent. For maximum realism, the stability augmentation should set to 0 percent (most realistic). Regarding the responsiveness bars, these may be set to higher values, depending on the user’s joystick. With full-scale helicopter controls, you would set it to 0 percent, as the cyclic has a log arm. With a desktop joystick, which is shorter, the user may set the responsiveness to higher values.”
Reading once more the above paragraph, I also tried to set the sliders to 50 and 100 percent, but honestly, I didn’t see or felt any or much difference. Or it’s just me, but the initial hovering and from flight back to hover mode is and stays difficult. Does this mean the R44 isn’t correctly modeled? No, that has more to do with the kind of hardware you have, rudder pedals or not or even the awesome solution, the Pro Flight Trainer PUMA hardware.
Anyway, after many test flights of which some where successful, some resulted in start up problems and so on, I decided to make video. As we all know, one video explains a lot then text. I’m also aware that this video isn’t perfect, but perhaps that’s also OK, just to show you that the modeled Robinson R44 is as real as it gets and some effort is needed to master the tiny helicopter.
Interviews with …..
The following section is a combination of interviews I had with the developer of the Robinson R44 “JetManHuss” from VSKYLABS and Sérgio Costa from Helisimmer.Com. Initially I planned to create separate sections, but finally decided to combine these email conversations as a source of things I found out or didn’t understand and questions I had how and what to deal with helicopters.
When you’re a vivid helicopter pilot, you’re probably aware of Helisimmer.Com, but when you’re not, then it’s worth to check this dedicated helicopter pilot simmers site. Not only for all kind of heli tutorials, but for much more that. The website is founded and edited by Sérgio Costa. Time to consult Sérgio and ask him a couple of questions, in particular related to all of you who read this review and have/had the same issues or questions I had.
And who doesn’t know VSKYLABS or in short VSL? Huss or JetManHuss has modeled already many models for X-Plane, but as stated on their website, VSL does a bit more then only this. “VSKYLABS was created out of curiosity and excitement. Aviation and space takes a major part in my life for decades, as a profession and as a hobby.”
All of the VSKYLABS projects are ‘experimental’ projects in terms of internal engineering and development techniques, as well as the flight performance aspect. Want to know more about VSL? Then you should check out their About Us web page.
Question I:
How to handle/use the cyclic (or joystick)?
Answer from Sérgio:
Do not grasp the joystick as if you were holding it for a fighter. Rest your hand on the base of the stick and move the stick using your fingers. It’s all about finesse. Oh and let the helicopter settle each time you do small movements. Wait to see what it does. Don’t worry about crashing. You can always restart the flight. Learn to “read” the helicopter. That’s the most important part. Keep your eyes away from the helicopter. Don’t look to the ground near you. That will make you crash.
Question II:
What the wing sweep assignment is doing?
Answer from Sérgio:
About your wing sweep, that is a hack. It’s a way for developers to be able to implement other systems (in this case, the governor) as X-Plane has some limitations.
Answer from JetManHuss from VSKYLABS:
In X-Plane, there is a built-in helicopter throttle governor system. Like in real life, it allows the pilot to fly the helicopter without constantly managing the throttle manually, as the pilot workload in a helicopter is already very high. Without such governor, for each collective input or change, the main rotor RPM would change, as the blades pitch is being changed via the collective control.
So without such throttle governor, the pilot should constantly manage the collective, and throttle to keep the rotor RPM in 100 percent for flight. Imagine a situation in which you are maneuvering and pulling up the collective. Rotor pitch increases and RPM drops. The pilot then must compensate the drop in RPM by increasing throttle. If he will fail to do so in time, RPM may reach too low values and it could be hazardous.
Back to X-Plane:
So there is a built in helicopter throttle governor. Once engaged, it takes over throttle management and makes sure that rotor RPM is 100 percent at all times (by managing throttle input automatically, sensing the RPM etc…). This mechanism in X-Plane is a two-state condition. ON and OFF. Once it is set to ON, the throttle axis is not in control. It gets overridden by the governor.
Back to real-world:
In the real-world, the governor kicks in with a certain amount of throttle (once the switch is ON). The pilot sets 100 percent throttle and leaves it there, and the governor stays in charge.
Then, when there is a need to reduce throttle, the pilot simply reduces throttle, and at some point (detent) the governor kicks out, and the throttle becomes manual…as long as the pilot won’t open it again to exceed the “kick in” detent.
And one more time back to X-Plane:
In X-Plane, this cannot be done once the governor kicks in, as the throttle axis is overridden. So the helicopter developers have two options: To design and code a whole custom governor system, or to come-up with a simpler solution. The simpler solution is to make use of an already existing Joystick axis, which is not in use when flying a helicopter. Internally, this axis is biased to throttle input, and a “governor detent” can be fixed. So when the governor kicks in, the fact that the throttle axis is overridden is meaningless…as we use the wing-sweep axis which is not overridden whatsoever…
Question III:
What I don’t understand is that when I gently increase the collective, and to correct a bit of anti torque, that once the heli comes from the ground, it starts moving backwards?
Answer from Sérgio:
This means that, when you pull the collective and you have the joystick centered, you should not expect for it to climb vertically and keep steady. Depending on a variety of factors (CG position, etc.) you may need to position the cyclic off center. That’s why is so important not to have a centering spring. There is no actual “center” in a helicopter. You may need to have a very fine control of the helicopter in any position to keep her steady.
Question IV:
Oops, I’m over controlling the helicopter. What do I do wrong?
Answer from Sérgio:
It’s very normal for new pilots to overcontrol the helicopter. Not just on the cyclic, but also on the collective. Once you take the helicopter off the ground, take your hand of the collective. For real! You don’t do this in real life, but do it in the sim. If the helicopter starts sinking, add a bit of collective but remove your hand from it again. Here’s why: we tend to move the collective a lot as we see the helicopter “floating”. Especially under “In Ground Effect” (IGE). What happens when we do that? We are making changes to anti-torque. And that adds more workload for you. You need more anti-torque, then you’ll need more cyclic, and so on.
Keep it simple. Take her off the ground, focus on the cyclic and pedals. Adjust the collective slightly if sinking, then leave it. From there, if you push the cyclic gently to the front and pick-up speed, you will notice that, as you cross around 20kts, the helicopter will lift by itself as the rotor disk becomes more effective and it enters ETL (Effective Translational Lift). It’s like magic. The first times I did it, it felt amazing. I was in actual full control of the helicopter and I didn’t even had to touch the collective.
Question V:
The R44 doesn’t have an Auto Pilot panel thus flying is pure done manually, right?
Answer from JetManHuss:
Yes, no autopilot for the R44, although there are plans to implement an autopilot down the road. In general, the R44/R66 were developed so that they could share some of the componentes (as done in real life…), so future development road-map is including implementing the advanced panel of the R66 into the R44 (as an additional variant), and vice versa – implementing the simple configuration inside the R66.
Question VI:
Besides the Garmin GNS430 which is I think the default LR unit, are all the other instruments including the COMM/NAV and ATC transponder home-made?
Answer from JetManHuss:
The avionics instruments are in-house made, “hosting” the functionality and displays of the built-in systems in X-Plane. For example, the GNS 430 3D “shell” is not a ready-made LR unit … however it utilizes the built-in LR GNS430 available display.
Sounds and FPS
I’m not so sure if the VSKYLABS R44 has own dedicated Robinson R44 sound files except then that I only found two sound files – autopilot_disco and autopilot_fail – in the dedicated Sounds/alert folder. That said, time to contact VSKYLABS and ask them to help me out with this. According to Huss from VSKYLABS “I would like to clarify that the real R44 recorded sounds which are in the VSKYLABS R44 are referring to the engine/rotor/transmission etc.. The interior “beeps” and alarms were synthetically constructed and engineered and were not recorded from a real-world R44. They are custom-generic representations of the various sounds.”
The modeled R44 isn’t a complex FPS eating helicopter. The model is relatively small, the cockpit equipment is based on regular old fashioned instruments so it shouldn’t result in low frame rates which it doesn’t. The R44 gives good frame rates and yes, I know, frame rates not only depend on your R44, but also at the airport your stationed, the landscape e.g. Orbx TrueEarth, your rendering settings, the monitor size and native monitor resolution and last but not least, your PC or Mac specifications.
That said, it’s worth to highlight the following advice I got from Sérgio; “You need decent hardware (the joystick you have is very good for it because of the spring but I really recommend some pedals in the future as it makes a huge, huge difference) and good FPS as well. If you’re getting less than 30FPS (minimum and stable, not peaks) in the sim, you may be fighting the sim itself as well. Proper FPS is necessary for the sim to process the flight dynamics the correct way. Otherwise, you’ll be lagging behind the software of vice-versa.”
Keeping my iMac Pro in mind, I can’t complain at all. It’s not difficult to get high FPS and then I mean 30+, 40+ and up. But I know that you won’t be disappointed either.
Summary
Let me first start with this; the review is based on VSKYLABS R44 package version 1.1.c. The package comes with the STMA updater, so normally you’ll run the VSKYLABS R44 never with outdated software. The installation is simple, straightforward, but a couple of more liveries would be welcome. The R44 basic package comes only with 2 liveries. According to Huss “a paint kit is located in the R44 folder and more liveries will be included at a later moment although it is not of a high-priority.”
Before I continue, I would like to thank a couple of persons. First, Huss or JetManHuss from VSKYLABS who took the time to explain a couple of things related to the modeled R44 and beyond that. I also would like to thank Sérgio Costa from Helisimmer.com. Sérgio is the editor and owner of this dedicated helicopter website. His help and suggestions where also motivating me to continue with this review and finally being able to master in a way the R44. Both Huss and Sérgio many many thanks for your input!
The VSKYLABS offers a couple of manuals of which one is very important namely how to essentially connect your flight sim hardware to the helicopter. Since the flight dynamics are as accurate as possible within the X-Plane boundaries, links are also provided to the official Robinson Helicopter Company POH.
The review has become a bit longer then expected, but I liked the R44 a lot and I explored new areas of Flight Simulation with helicopters. It’s also a new world for those who have never flown helicopters. Since the modeled R44 is as real as it gets in respect to the real flight dynamics, it’s not just “step in and fly away”. Because of that, I included in this review lots of tips and tricks from myself during that learning process, many suggestions from Sérgio Costa (Helisimmer.com) and a lot of help from Huss from VSKYLABS. Put all that information together, and you’re ready too to master the Robinson R44.
For those who own the VSKYLABS Robinson R66, they would wonder what different there are versus the modeled R44. Of course, you can all find it at the official Robinson website, but Huss from VSKYLABS is also willing to help me. According to Huss “There are various differences. In short, the R66 is a newer helicopter, powered by a turbine engine, has a bigger (wider) cabin, can carry heavier payload and climbs faster than the R44.”
Although I don’t own dedicated helicopter hardware, using a joystick with throttle device and rudder pedals will work too. Without rudder pedal equipment is also possible, but assigning the anti-torque (YAW) function to a slider makes it all a bit more difficult to control.
After you’ve learned the basics, the R44 is an easy, tiny, nicely modeled helicopter from VSKYLABS. It’s actually the smaller brother – or sister – of the R66. As I mentioned in a previous paragraph, with the help from Huss and also from Sérgio, I was able to review the Robinson R44 in it’s full glory and I can tell you, after such a long review I enjoyed every minute testing this helicopter and sill testing and exploring.
I hoped you liked the review, I also hope it will help you in making the right decision. For more information please visit the dedicated X-Plane.Org VSKYLABS Robinson R44 store page. As of this writing – regular price November 27th 2020 – the R44 will cost you 33.95 USD.
Feel free to contact me if you’ve got additional questions related to this impression. You can reach me via email Angelique.van.Campen@gmail.com or to Angelique@X-Plained.com.
With Greetings,
Angelique van Campen
| Add-on: | Payware VSKYLABS Robinson R44 Raven II |
|---|---|
| Publisher | Developer: | X-Plane.Org | VSkyLabs |
| Description: | Realistic rendition of the Robinson R44 Raven II |
| Software Source / Size: | Download / Approximately 408MB (unzipped) |
| Reviewed by: | Angelique van Campen |
| Published: | November 27th 2020 |
| Hardware specifications: | - iMac Pro - Intel 3GHz Intel Xeon W / 4.5Ghz - Radeon Pro Vega 64 16368 MB - 64 GB 2666 MHz DDR4 - 1 internal shared 1TB SSD (Big Sur 11.x) - 1 internal shared 1TB SSD (Bootcamp Windows 10) - 1 external 2TB LaCie Rugged Pro SSD (Big Sur 11.x) - Saitek Pro Flight System X-52 Pro and X-56 Rhino - Honeycomb Alpha Flight Controls - Honeycomb Bravo Throttle Quadrant |
| Software specifications: | - macOS Big Sur (10.15.x) - X-Plane 11.5x |
0 Comments